2021.07.16
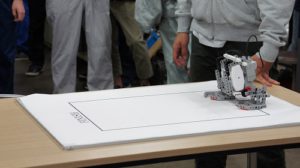
ロボットプロジェクト(二足ロボット班)の、競技会をおこないました。 まず、歯車やピン、フレーム、モータなどの部品を組み合わせて、各人が二足ロボットを作りました。その後、滑り止めの工夫を足裏に追加し、左右にぶれずに歩くための両足の動きのバランスをプログラムによって調整しました。競技会では、できるだけまっすぐ歩く速さを競いました。